
ภาพรวม
เครื่องมือกล CNC คือการประยุกต์ใช้เครื่องกล ไฟฟ้า ไฮดรอลิก นิวแมติก ไมโครอิเล็กทรอนิกส์ และข้อมูลและเทคโนโลยีอื่น ๆ เข้าด้วยกัน โดยเป็นหนึ่งในผลิตภัณฑ์บูรณาการระบบเครื่องกลไฟฟ้าในอุปกรณ์การผลิตเครื่องจักรกลที่มีความยืดหยุ่น สากล มีความแม่นยำสูง มีความแม่นยำสูง อุปกรณ์การผลิตอัตโนมัติที่มีประสิทธิภาพ "ยืดหยุ่น" จะประมวลผลการทำงานและขั้นตอนต่างๆ ที่จำเป็น และรูปร่างและขนาดของชิ้นงานด้วยรหัสดิจิทัล ผ่านสื่อควบคุมเข้าสู่อุปกรณ์ควบคุมเชิงตัวเลข อุปกรณ์ควบคุมเชิงตัวเลขไปยังข้อมูลอินพุต การประมวลผลและการคำนวณ ระบบควบคุมเครื่องมือกลคำสั่งและส่วนประกอบของไดรฟ์ การประมวลผลชิ้นงานที่ต้องการโดยอัตโนมัติ ระดับทางเทคนิคของเครื่องมือกล CNC และเปอร์เซ็นต์ในผลผลิตและความเป็นเจ้าของรวมของเครื่องมือเครื่องตัดโลหะเป็นหนึ่งในตัวบ่งชี้ที่สำคัญในการวัดระดับการพัฒนาเศรษฐกิจของประเทศและการผลิตทางอุตสาหกรรมโดยรวมของประเทศ ในช่วงไม่กี่ปีที่ผ่านมา ส่วนแบ่งของเครื่องมือเครื่อง CNC ในองค์กรของจีนเพิ่มขึ้นทุกปี และมีการใช้มากขึ้นในองค์กรขนาดใหญ่และขนาดกลาง และโดยทั่วไปยังใช้ในองค์กรขนาดเล็กและขนาดกลางและแม้กระทั่ง รัฐวิสาหกิจแต่ละแห่ง
ข้อกำหนดกระบวนการกลึง CNC
- เมื่อชิ้นงานถูกประมวลผลด้วยเครื่องกลึง CNC ปริมาณการป้อนจะมีมาก ความเร็วในการประมวลผลต่ำ และกระบวนการตัดเฉือนมีผลกระทบต่อโหลดเนื่องจากพื้นผิวที่ไม่เรียบของชิ้นงาน
- การกลึงขั้นสุดท้าย ปริมาณการป้อนมีขนาดเล็ก เพื่อให้มั่นใจในประสิทธิภาพการประมวลผล ความเร็วในการประมวลผลสูง
- มอเตอร์สปินเดิลจำเป็นต้องมีความเร็วต่ำและมีแรงบิดสูง และมีความเสถียรและสามารถทำงานด้วยความเร็วสูงได้
- การรับสัญญาณอะนาล็อกจำเป็นต้องมีความเป็นเชิงเส้นสูงและสัญญาณรบกวนที่มีโหลดต่ำ
- เสียงมอเตอร์มีขนาดเล็กและการรบกวนอุปกรณ์ระบบอัตโนมัติมีขนาดเล็ก เพิ่มความเร็วและลดความเร็วให้น้อยที่สุด
ข้อดีของผลิตภัณฑ์ซีรีส์ CNClathe KD600
อินเวอร์เตอร์เวกเตอร์ประสิทธิภาพสูงซีรีส์ Kd600 ใช้เทคโนโลยีการควบคุมฟลักซ์ขั้นสูง แรงบิดของมอเตอร์ที่ความเร็วต่ำมีขนาดใหญ่ ความแม่นยำของความเร็วสูง ราคาสมเหตุสมผล ฟังก์ชั่นเสร็จสมบูรณ์ พร้อมการประมวลผลไฟฟ้าขัดข้องทันทีและการติดตามความเร็วและเริ่มต้นใหม่อีกครั้ง เพื่อให้แน่ใจว่าระบบบรรลุกลไกการทำงานอย่างต่อเนื่อง เพื่อให้แน่ใจว่ามอเตอร์กำลังทำงานในสถานะประสิทธิภาพสูงสุด ดังนั้น การใช้อินเวอร์เตอร์เวกเตอร์ประสิทธิภาพสูงซีรีส์ KD600 แทนระบบเซอร์โว AC แกนหมุนจึงเป็นตัวเลือกที่ดีที่สุดสำหรับอุตสาหกรรมเครื่องมือกล อินเวอร์เตอร์ซีรีส์ KD600 มีคุณสมบัติดังต่อไปนี้:
- เทคโนโลยีการควบคุมแม่เหล็กแบบอ่อนที่ไม่ซ้ำใคร: สามารถควบคุมมอเตอร์แรงบิดขนาดใหญ่ความถี่ต่ำได้ดี สามารถทำงานใน 0 ~ 600Hz
- ความเร็วหยุดที่รวดเร็วและเสถียร: เทคโนโลยีหยุดการชะลอความเร็วแม่เหล็กสามารถทำให้มอเตอร์ช้าลงและหยุดได้ในเวลาที่สั้นลง
- ความแม่นยำและความเสถียรของความเร็ว: ความเป็นเชิงเส้นของการตั้งค่าความเร็วนั้นดี ความแม่นยำของความเสถียรของความเร็วนั้นสูง และความผันผวนของความเร็วอยู่ภายใน 5/1000 เมื่อโหลดเปลี่ยนแปลง
- ประสิทธิภาพความถี่ต่ำที่ยอดเยี่ยม: อัลกอริธึมควบคุมเวกเตอร์ที่ปราศจาก PG ที่ได้รับการปรับให้เหมาะสม ความถี่ต่ำ 1Hz ถึงเอาต์พุตแรงบิดสูงสุด 150% เพื่อให้มั่นใจถึงแรงตัดที่แข็งแกร่งในระหว่างการประมวลผลที่ว่างเปล่า
- ให้โหมดอินพุตความถี่หลายแบบ: แหล่งจ่ายแรงดันไฟฟ้า 2 แหล่ง 0 ~ 10V หรือ -10V ถึง +10V อินพุต, 1 แหล่งกระแส 4~20mA หรืออินพุต 0~20mA
- การประยุกต์ใช้แรงดันไฟฟ้ากริดที่หลากหลาย: การออกแบบแหล่งจ่ายไฟแบบสวิตชิ่งขั้นสูงสามารถนำไปใช้กับสภาพแวดล้อมกริดที่หลากหลาย
- กระบวนการผลิตอันประณีต: ใช้กระบวนการเคลือบหนาเป็นพิเศษ ท่ออากาศถูกแยกออกจาก PCB ภายในอย่างสมบูรณ์ และมีความสามารถในการปรับตัวที่แข็งแกร่งกับสภาพแวดล้อมทางกายภาพที่รุนแรง เช่น ฝุ่นโลหะ ก๊าซที่มีฤทธิ์กัดกร่อน และความชื้น
- วงจรดูดซับการรั่วไหลในตัวช่วยลดไฟฟ้าช็อตต่อร่างกายมนุษย์ได้อย่างมากเมื่อชาร์จกล่องอุปกรณ์
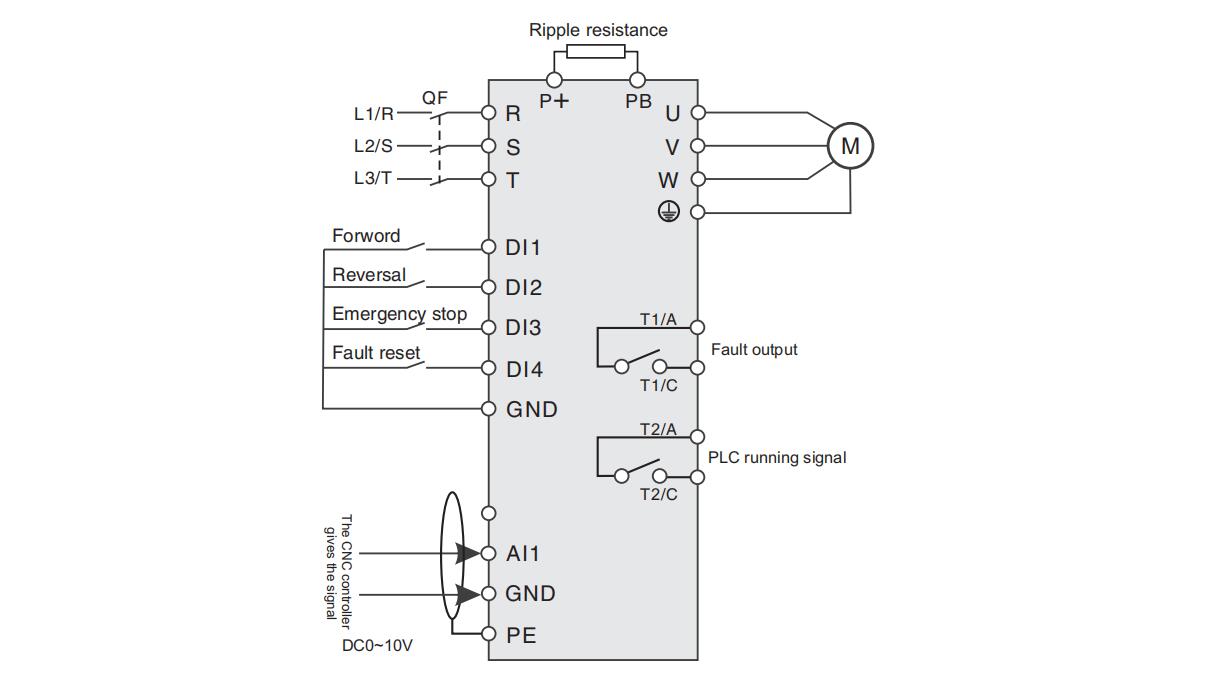
แผนภาพการเดินสายไฟพื้นฐาน
การตั้งค่าพารามิเตอร์และคำอธิบาย
| การตั้งค่าพารามิเตอร์ | คำแนะนำ | การตั้งค่าพารามิเตอร์ | คำแนะนำ |
| P0-03=1 | ไม่มีโหมดเวกเตอร์ PG | P4-01=11KW | กำลังไฟพิกัดของมอเตอร์ |
| P0-04=1 | เทอร์มินัลภายนอกเริ่มหรือหยุด | P4-02=380V | พิกัดแรงดันไฟฟ้าของมอเตอร์ |
| P0-06=2 | ให้ปริมาณแอนะล็อก AI1 ไว้ | P4-04=22.6A | พิกัดกระแสของมอเตอร์ |
| P0-14=150 | ความถี่เอาต์พุตสูงสุด | P4-05=50เฮิร์ต | ความถี่พิกัดของมอเตอร์ |
| P0-16=150 | ขีดจำกัดความถี่การทำงานด้านบน | P1-06=1435RPM | จัดอันดับความเร็วมอเตอร์ |
| P0-23=1.0 | เวลาเร่งความเร็ว | P6-00=2 | เอาต์พุตข้อผิดพลาด |
| P0-24=0.8 | เวลาชะลอตัว | P6-02=1 | ตัวแปลงความถี่กำลังทำงาน |
| P5-00=1 | วิ่งไปข้างหน้า | P5-01=2 | วิ่งกลับหัว |
| โปรดป้อนพารามิเตอร์มอเตอร์ P4-01~P4-06 ให้ถูกต้อง | |||
ผลลัพธ์การดีบัก
ได้รับการพิสูจน์แล้วว่าตัวแปลงความถี่เวกเตอร์ประสิทธิภาพสูงซีรีส์ KD600 สามารถตอบสนองความต้องการของการควบคุมแกนหมุนของเครื่องมือเครื่องจักรได้อย่างเต็มที่ KD600 ใช้โหมดควบคุมเวกเตอร์ที่ปราศจาก PG ชั้นนำ ซึ่งสามารถส่งแรงบิด 150% ได้อย่างราบรื่นแม้ภายใต้การทำงานที่ความเร็วต่ำ (ความถี่ต่ำ) เพื่อตอบสนองความต้องการในการประมวลผลของชิ้นส่วนต่างๆ และสามารถเปลี่ยนโครงสร้างแกนหมุนของแบริ่งกลิ้งแบบเดิมได้อย่างสมบูรณ์และแกนหมุนนี้ โครงสร้างที่เรียบง่าย กะทัดรัด และสามารถควบคุมความเร็วแบบไม่มีขั้นตอนได้อย่างแท้จริง ความเร็วของสปินเดิลนี้ถูกควบคุมโดยสัญญาณอะนาล็อกภายนอกเพื่อควบคุมความถี่เอาต์พุตในกระบวนการประมวลผลที่แตกต่างกัน (เช่น การกัดหยาบ การตกแต่ง ฯลฯ) ซึ่งต้องใช้ความเร็วที่แตกต่างกัน ในขณะนี้ ระบบควบคุมเชิงตัวเลขสามารถส่งสัญญาณแรงดันไฟฟ้าอะนาล็อกที่แตกต่างกันไปยัง อินเวอร์เตอร์เพื่อให้ได้ความเร็วที่แตกต่างกัน และสัญญาณเริ่มต้นและหยุดยังถูกควบคุมโดยระบบควบคุมเชิงตัวเลข ซึ่งช่วยเพิ่มระดับของระบบอัตโนมัติและยืดอายุการใช้งานของเครื่องมือ

เวลาโพสต์: 17 พ.ย.-2023