
ภาพรวม
เครนสะพานหรือที่เรียกกันทั่วไปว่า "การขับขี่" เป็นเครื่องจักรยกชนิดหนึ่งที่ใช้กันอย่างแพร่หลายในสถานประกอบการอุตสาหกรรมและเหมืองแร่ กลไกการทำงานของมันประกอบด้วยระบบขับเคลื่อนอิสระสามระบบโดยทั่วไป ระบบขับเคลื่อนรถยนต์ ระบบขับเคลื่อนแบบตะขอ อินเวอร์เตอร์ K-DRIVE ไปยัง ข้างต้นสามระบบขับเคลื่อนประสบความสำเร็จในการปฏิรูป ต่อไปนี้ส่วนใหญ่จะอธิบายกระบวนการเปลี่ยนแปลงของการขับขี่ก่อนและหลังระบบเดิน

โครงการ ข้อดี
- การควบคุมเวกเตอร์ลูปเปิดปัจจุบันแบบเน้นภาคสนาม, ตัวแปรมอเตอร์แบบแยกส่วนอย่างสมบูรณ์, แรงบิดความถี่ต่ำขนาดใหญ่, การตอบสนองที่รวดเร็ว ฯลฯ
- KD600 ใช้โหมดควบคุมเวกเตอร์ open-loop ฟรี PG และโหมด vectorized V/F และขยายการกำหนดค่าระดับพลังงานของเกียร์แรก
- ช่วงความถี่: การตั้งค่าส่วน 0.5-600Hz, การปรับอย่างต่อเนื่องแบบ stepl-ess;
- ช่วงแรงดันไฟฟ้าทำงาน: 380V ± 20% และแรงดันไฟฟ้าของบัสลดลงเหลือ 360VDC ทันทีเพื่อให้ใช้งานได้โดยปราศจากปัญหา
- ความจุเกินพิกัด: 150% ของกระแสไฟที่กำหนด อนุญาต 1 นาที; จัดอันดับปัจจุบัน 200% อนุญาต 1 วินาที;
- ลักษณะแรงบิด: แรงบิดเริ่มต้น มากกว่า 2 เท่าของแรงบิดพิกัด แรงบิดความถี่ต่ำ มากกว่า 1.6 เท่าของแรงบิดพิกัดที่ 1Hz; แรงบิดในการเบรกมากกว่าแรงบิดที่กำหนด
ลักษณะการดำเนินงาน
- กลไกการยกของเครนมีแรงบิดเริ่มต้นสูง ซึ่งมักจะเกิน 150% ของแรงบิดพิกัด หากพิจารณาถึงโหลดเกินและปัจจัยอื่นๆ จะต้องจัดให้มีแรงบิดที่กำหนดอย่างน้อย 200% ในระหว่างกระบวนการสตาร์ทและเร่งความเร็ว
- เมื่อกลไกการยกทำงานลง มอเตอร์จะอยู่ในสถานะสร้างพลังงานหมุนเวียน และจะต้องเป็นการเบรกการใช้พลังงานหรือป้อนกลับการจ่ายพลังงานใหม่ให้กับกริด
- โหลดของกลไกการยกเปลี่ยนแปลงอย่างมากเมื่อวัตถุที่ยกออกจากหรือสัมผัสพื้น และตัวแปลงความถี่จะต้องสามารถควบคุมโหลดอิมแพ็คได้อย่างราบรื่น
- เนื่องจากความเร็วการเคลื่อนที่ของกลไกการเคลื่อนที่ด้านหน้าและด้านหลังของเครนไม่สูงในระหว่างการออกแบบทางกล จึงสามารถใช้ตัวแปลงสำหรับความเร็วเกินที่เหมาะสมเพื่อปรับปรุงประสิทธิภาพการทำงาน
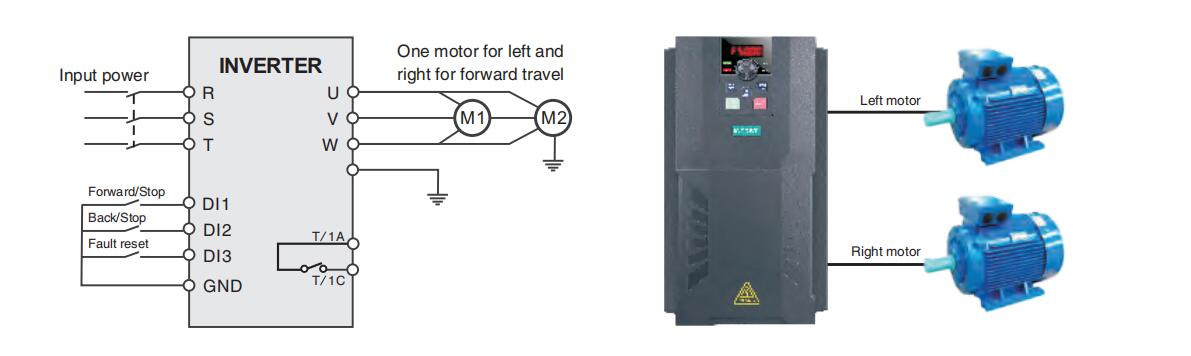
แผนภาพการเดินสายไฟอย่างง่าย
พารามิเตอร์ตั้งค่าng และคำอธิบาย(พารามิเตอร์การเคลื่อนที่ของมอเตอร์ซ้ายและขวา)
| พารามิเตอร์ | อธิบาย | การตั้งค่าพารามิเตอร์ | อธิบาย |
| P0-00=0 | การควบคุมวีเอฟ | P5-00=1 | ซึ่งไปข้างหน้า |
| P0-04=1 | หยุดสตาร์ทเทอร์มินัลภายนอก | P5-01=2 | ดำเนินการในภายหลัง |
| P0-06=1 | การตั้งค่าความถี่ดิจิตอล | P6-00=2 | รีเลย์เอาต์พุตความผิดปกติ 1 ตัว |
| ส0-14=60.00 | ความถี่สูงสุด | P4-01=1.6KW | เชื่อมต่อกำลังมอเตอร์ |
| ส0-16=60.00 | ความถี่ขีดจำกัดบน | P4-02=380V | แรงดันไฟฟ้าที่กำหนดของมอเตอร์ |
| ส0-11=60.00 | ความถี่การตั้งค่าดิจิตอล | P4-04=3.3A | มอเตอร์จัดอันดับปัจจุบัน |
| P0-23=3.0 วินาที | เวลาเร่งความเร็ว | P4-05=50เฮิร์ต | ความถี่พิกัดของมอเตอร์ |
| P0-24=2.0 วินาที | เวลาชะลอตัว | P4-06=960R/นาที | ความเร็วสูงสุดของมอเตอร์ |
| หมายเหตุ: เมื่อใช้ตัวแปลงความถี่หนึ่งตัวกับมอเตอร์สองตัว ขอแนะนำอย่างยิ่งให้ติดตั้งรีเลย์ความร้อนที่ตรงกันที่ส่วนหน้าของมอเตอร์แต่ละตัวเพื่อป้องกันมอเตอร์แต่ละตัว | |||
การวิเคราะห์ผลการดำเนินงาน
ตัวแปลงความถี่ซีรีย์ KD600 ได้ทำการแปลงความถี่ในระบบการเดินทางและเอฟเฟกต์ tr-ansformation นั้นค่อนข้างเหมาะสมโดยส่วนใหญ่จะแสดงใน:
- มีการรับรู้การสตาร์ทแบบนุ่มนวลและการหยุดแบบนุ่มนวลในระหว่างการสตาร์ท ซึ่งจะช่วยลดผลกระทบต่อโครงข่ายไฟฟ้า
- หลังจากใช้ตัวแปลงความถี่แล้ว จะละเว้นคอนแทคเตอร์กะเดิมและตัวต้านทานควบคุมความเร็ว ซึ่งไม่เพียงแต่ช่วยประหยัดค่าบำรุงรักษา แต่ยังช่วยลดเวลาหยุดทำงานสำหรับการบำรุงรักษา ซึ่งจะเป็นการเพิ่มเอาท์พุตอีกด้วย
- เมื่อตะขอหลักทำงานที่ 5Hz ~ 30Hz ผลการประหยัดพลังงานจะชัดเจนมาก
- ตัวแปลงความถี่ใช้เพื่อควบคุมการเคลื่อนที่ด้านหน้าและด้านหลัง และชุดกลไกการเคลื่อนที่ด้านซ้ายและขวาสามารถรับรู้การทำงานของความถี่เกินได้ ภายใต้หลักประกันความปลอดภัย ประสิทธิภาพในการทำงานได้รับการปรับปรุงอย่างมาก และภาระงานในการบำรุงรักษาอุปกรณ์การเดินทางเนื่องจากการเปลี่ยนคอนแทคเตอร์ AC บ่อยครั้งก็ลดลงเช่นกัน
คำกล่าวปิดท้าย
ตัวแปลงความถี่ใช้เพื่อควบคุมการเดินด้านหน้าและด้านหลังและชุดกลไกการเดินซ้ายและขวาซึ่งสามารถรับรู้งานโอเวอร์คล็อกได้ ปรับปรุงประสิทธิภาพการทำงานอย่างมากภายใต้สถานที่ตั้งของการสร้างความมั่นใจในความปลอดภัย และยังช่วยลดภาระงานบำรุงรักษาของอุปกรณ์ขับขี่เนื่องจาก การเปลี่ยนคอนแทคเตอร์ AC บ่อยครั้ง
ไซต์แอปพลิเคชัน

เวลาโพสต์: 17 พ.ย.-2023