
ภาพรวม
รถบรรทุกคานเดี่ยวเป็นอุปกรณ์ที่ใช้กันทั่วไปในด้านอุตสาหกรรม ซึ่งใช้ในการรับรู้การเคลื่อนไหวของสินค้าในพื้นที่สามมิติ ในหมู่พวกเขา การทำงานของเครื่องบินแนวนอนสองทิศทางเสร็จสมบูรณ์ โดยขนาดใหญ่ รถ ทิศทางแนวตั้งของการดำเนินการรับผิดชอบในการยกกลไกรอกไฟฟ้า รอกไฟฟ้าเป็นมอเตอร์ทรงกรวยสองความเร็ว โหมดควบคุมไฟฟ้าโดยพื้นฐานแล้วเป็นคอนแทค AC เริ่มต้นโดยตรง กระแสกระแทกมีขนาดใหญ่เกินไป ง่ายต่อการสร้างความเสียหายให้กับมอเตอร์และส่วนประกอบ อายุการใช้งานของอุปกรณ์เครื่องจักรกลสั้นลง ปริมาณการบำรุงรักษาค่อนข้างมาก และลักษณะการควบคุมความเร็วไม่ดี การดีบักไม่ราบรื่นเพียงพอ
ลักษณะการทำงานของรอกไฟฟ้า
เครนมีแรงบิดเริ่มต้นสูง โดยปกติจะมากกว่า 150% ของแรงบิดที่กำหนด หากพิจารณาถึงโหลดเกินและปัจจัยอื่นๆ ควรให้แรงบิดที่กำหนดอย่างน้อย 200% ในระหว่างกระบวนการเร่งความเร็วในการสตาร์ท
เมื่อกลไกการยกกำลังทำงานลง มอเตอร์จะอยู่ในสถานะการสร้างพลังงานที่สร้างใหม่ และจะต้องถูกเบรกการใช้พลังงานหรือป้อนกลับพลังงานใหม่ไปยังกริด
โหลดของกลไกการยกเปลี่ยนแปลงอย่างรวดเร็วเมื่อน้ำหนักยกออกจากหรือสัมผัสพื้น และอินเวอร์เตอร์ควรจะสามารถควบคุมโหลดการกระแทกได้อย่างราบรื่น
คุณสมบัติของอินเวอร์เตอร์ KD600
- การควบคุมเวกเตอร์วงเปิดกระแสแม่เหล็กที่มุ่งเน้นสนามแม่เหล็ก ตัวแปรมอเตอร์จะถูกแยกส่วนอย่างสมบูรณ์ โดยมีแรงบิดความถี่ต่ำ ความเร็วตอบสนองที่รวดเร็ว และลักษณะเฉพาะอื่นๆ
- KD600 ใช้โหมดควบคุมเวกเตอร์แบบวงเปิดแบบไม่มี PG และโหมด V/F แบบเวกเตอร์เพื่อขยายระดับพลังงานของขั้นตอนเดียว
- ช่วงความถี่: การตั้งค่าเวที 0.5-600Hz, การปรับอย่างต่อเนื่องแบบไม่มีขั้นตอน;
- ช่วงแรงดันไฟฟ้าทำงาน: 380V ± 20% แรงดันบัสทันทีต่ำถึง 360VDC การทำงานที่ปราศจากปัญหา
- ความจุเกินพิกัด: กระแสไฟที่ได้รับการจัดอันดับ 150% ให้เวลา 1 นาที; จัดอันดับปัจจุบัน 200% อนุญาต 1 วินาที;
- ลักษณะแรงบิด: แรงบิดเริ่มต้น มากกว่า 2 เท่าของแรงบิดพิกัด แรงบิดความถี่ต่ำ 1Hz มากกว่า 1.6 เท่าของแรงบิดพิกัด แรงบิดในการเบรกนั้นมากกว่าแรงบิดที่กำหนด
แผนภาพการเดินสายไฟอย่างง่าย
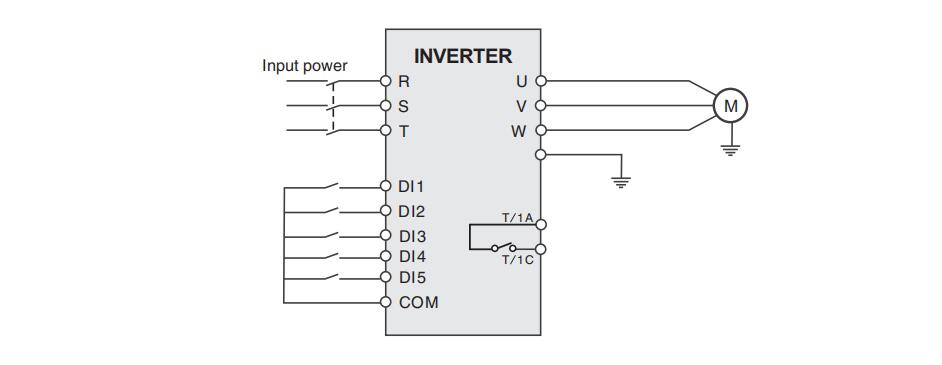
พารามิเตอร์อ้างอิง การตั้งค่าและคำอธิบายมีดังนี้
| รหัสฟังก์ชั่น | ตั้งค่า | คำแนะนำ | หมายเหตุ |
| P0-03 | 1 | โหมดเวกเตอร์ | |
| P0-04 | 1 | การควบคุมเทอร์มินัล | |
| P0-06 | 4 | ความถี่หลายความเร็ว | |
| P0-23 | 3 | เวลาเร่งความเร็ว | |
| P0-25 | 5 | เวลาชะลอตัว | |
| P6-00 | 32 | การควบคุมเบรก | |
| B5-00 | 1 | เปิดใช้งานเบรก | |
| B5-01 | 2.5 | ปล่อยความถี่เบรก | |
| B5-04 | 1.5 | ความถี่เบรก | |
| P4-01 | กำลังมอเตอร์ | ||
| P4-02 | แรงดันไฟฟ้าของมอเตอร์ | ||
| P4-04 | กระแสไฟที่กำหนดของมอเตอร์ | ||
| P4-05 | ความถี่ที่กำหนดของมอเตอร์ | ||
| P4-06 | ความเร็วมอเตอร์ | ||
| P5-00 | 1 | ซึ่งไปข้างหน้า | |
| P5-01 | 2 | ย้อนกลับ | |
| P5-02 | 12 | มัลติสปีด 1 | ความเร็วต่ำ |
| P5-03 | 13 | มัลติสปีด 2 | ความเร็วกลาง |
| P5-04 | 14 | มัลติสปีด 3 | ความเร็วสูง |
| พีซี-01 | ความถี่ความเร็วต่ำ | ||
| พีซี-02 | ความถี่ความเร็วปานกลาง | ||
| พีซี-04 | ความถี่ความเร็วสูง |
การวิเคราะห์ผลการดำเนินงาน
การแปลงอินเวอร์เตอร์ซีรีส์ KD ของระบบขับเคลื่อน เอฟเฟกต์การเปลี่ยนแปลงเหมาะอย่างยิ่ง ส่วนใหญ่ใน:
- การสตาร์ทแบบนุ่มนวลและการหยุดแบบนุ่มนวลเกิดขึ้นเมื่อสตาร์ท ช่วยลดผลกระทบต่อโครงข่ายไฟฟ้า
- การใช้ตัวแปลงความถี่เพื่อกำจัดคอนแทคเตอร์แบบเดิมและความต้านทานความเร็ว ซึ่งก็คือ เพื่อประหยัดค่าบำรุงรักษา แต่ยังช่วยลดเวลาการบำรุงรักษาที่หยุดทำงาน ซึ่งจะช่วยปรับปรุงเอาต์พุต
- ตะขอหลักที่ทำงานที่ 5Hz~30Hz อาจให้ผลที่ชัดเจนมาก
- ปรับปรุงกระบวนการภาคสนาม บันทึกวัตถุดิบ
คำกล่าวปิดท้าย
การใช้ตัวแปลงความถี่เพื่อควบคุมการเคลื่อนที่ด้านหน้าและด้านหลัง รวมถึงซีรีย์กลไกการเคลื่อนที่ซ้ายและขวา สามารถบรรลุการทำงานที่ความถี่สูงกว่า ปรับปรุงประสิทธิภาพการทำงานอย่างมากในขณะที่มั่นใจในความปลอดภัย และยังช่วยลดภาระงานบำรุงรักษาของการเปลี่ยน AC บ่อยครั้ง คอนแทคเตอร์ในอุปกรณ์การขับขี่
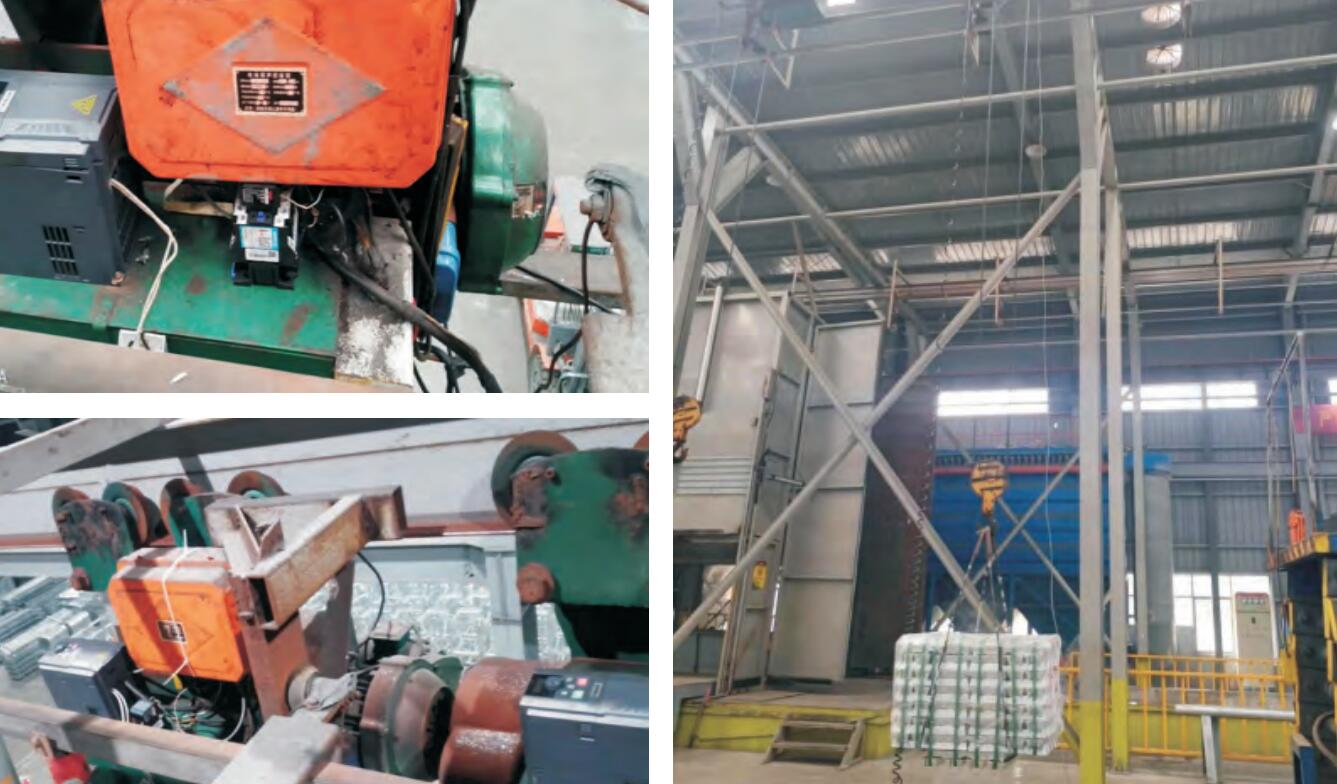
ไซต์แอปพลิเคชัน
เวลาโพสต์: 17 พ.ย.-2023